

工业机器人用摩擦片
- 机器人的摩擦制动主要靠伺服电机里面的刹车 机构.一旦刹车释放,伺服电机轴的转动就会受到阻力. 机器人的运动停止模式.直接切断驱动器供电,同时释放刹车. 先驱动器控制减速制动
- 咨询热线:13901596862
-


13901596862


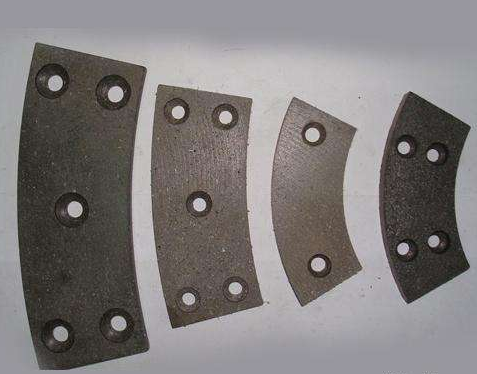

咨询:工业机器人用摩擦片
多种系列的摩擦材料制品
Copyright 2018-2019 南京多联摩擦材料有限公司